 在線客服
在線客服 微信客服
微信客服

















 [VIP第4年] 指數(shù):4
[VIP第4年] 指數(shù):4 通過認證
通過認證 







咨詢電話
021-80392549


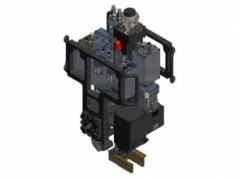
產(chǎn)品信息:賓采爾 Optic for remote laser welding RLW-A
減少二氧化碳排放是一個特別有意義的問題。為了實現(xiàn)這些高目標,Scansonic開發(fā)了一個相應的生產(chǎn)頭,可以使用遠程激光技術在搭接中焊接角焊縫。
目前在白色生產(chǎn)的身體主要是重疊接縫部署,可以由角焊縫代替。通過角焊,可以減少法蘭的必要長度,不需要預先步驟就能保持穩(wěn)定的工藝,同時也需要較少的激光能量。
怎么運行的
集成在焊接頭中的光學接縫跟蹤識別接頭,并將激光焦點定位在連接片上。由于高工作距離,頭部能夠超越扳手和工件輪廓。與觸覺系統(tǒng)相比,必要的處理時間大大減少,標準激光遙控頭的處理時間要稍微高一些。
RLW-A激光系統(tǒng)結合光縫跟蹤和高動態(tài)掃描儀。這使得能夠使用具有廣泛聯(lián)合類型的困難的3D幾何形狀。通過根據(jù)焊縫跟蹤的測量數(shù)據(jù)調(diào)整鏡子,使RLW-A處理機器人移動來檢測并跟隨接縫。激光束和測量光由相同的光學系統(tǒng)控制。
優(yōu)點
高效的圓角焊接工藝允許減少用于汽車底盤中的法蘭應用的材料。
這種減少的法蘭會減輕重量,從而減少燃料消耗和二氧化碳排放。
即插即用系統(tǒng)。不需要在復雜的機器人接口上集成。
運行過程中的較大工作距離允許通過夾具和緊固固定件行進,以便與其他激光焊接系統(tǒng)相比,循環(huán)時間要短得多。
高度動態(tài)的接縫跟蹤系統(tǒng)可確保可靠的查找和跟蹤跟蹤。材料和夾緊裝置的公差是可靠的平衡。
斑點尺寸可以通過使用自動對焦進行調(diào)整,并在此過程中進行安裝。
通過使用較小的交叉射流,因為較小的蓋玻片,壓縮空氣的消耗成本非常低。
長工作距離,因此通過過程飛濺,煙霧等減少污染
整個系統(tǒng)的模塊化設計利用了Scansonicscapacs®模塊化系統(tǒng)。幾乎所有類型的光學特性,光纖耦合器或現(xiàn)場總線接口都是可配置的。
具有超現(xiàn)代主設計的耐用且完整的解決方案,包括執(zhí)行器,傳感器以及現(xiàn)場總線控制器。
由于位置確定與激光束是同軸的,所以保證了高精度的接縫跟蹤。
了解更多請前往:機器人焊接配件
絡安全監(jiān)察")


絡110報警服務")
